Vibrotactile Balance Feedback

In my Ph.D. thesis, at the Shared Reality Lab of McGill University, I investigated vibrotactile feedback systems for balance feedback, specifically a belt for novel feedback mappings, and shoes, described separately. The belt incorporates four state-of-the-art voicecoil actuators and an orientation sensor, allowing embedded synthesis of a novel pulse-based feedback. Motivated by my slackline practice to help people with balance deficits, such as stroke survivors or the elderly.
Skills: PCB Design + Manufacturing, Embedded Development (Arduino/Wiring), Software Development and Sound Synthesis (Python, Supercollider), Study Design and Execution, Data Analysis (R/Python), Scientific Writing
Better balance reduces risk of falls, and balance training is commonly prescribed to the elderly and stroke survivors.
Augmented feedback, that is, providing feedback additional to the natural, intrinsic one, may support motor learning and rehabilitation tasks, such as balance training.
The sense of touch may be uniquely suited to provide localized feedback that does not require eyes or ears to be available, which may be impaired or unavailable.
While wearables using vibrotactile feedback on posture have been demonstrated in laboratory settings, they commonly use a stationary, tethered setup, or simplistic eccentric rotating mass vibration motors (ERMs) as tactile actuators, or tactors.
More expressive voice-coil vibrotactile actuators, also known as HD Haptics, are becoming available at a reasonable price point, and promise tactile stimuli going beyond the buzz of ERMs.
However, they are driven by audio signals, making them significantly harder to drive than.
The goal of my thesis was two-fold: provide an infrastructure for wearable control of such tactors, and study their use for novel feedback mappings that go beyond an intensity coding possible with ERMs.
Shown below are three interations of a fully wearable belt system for study of novel feedback stimuli.
Iterative prototype development
First Prototype

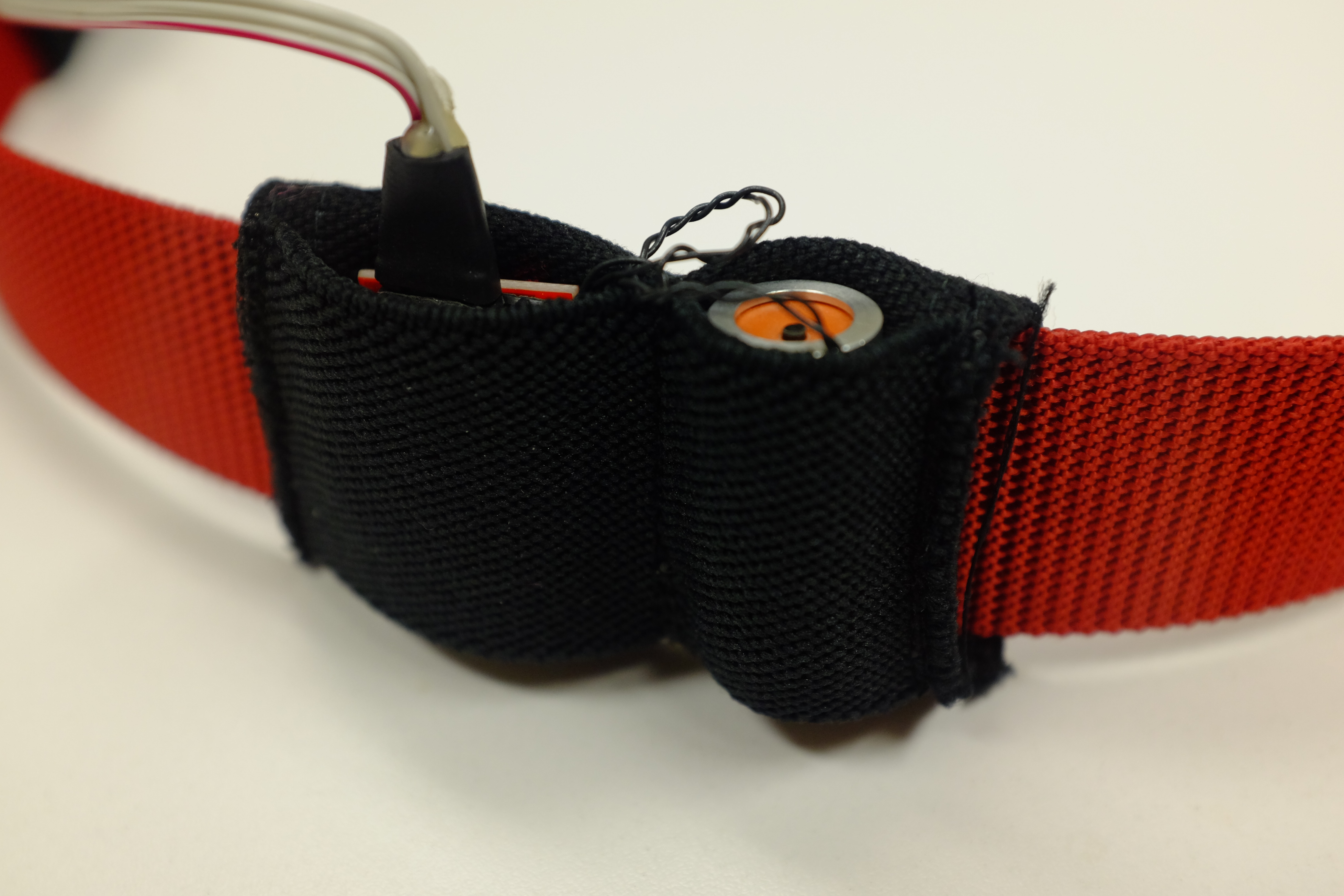
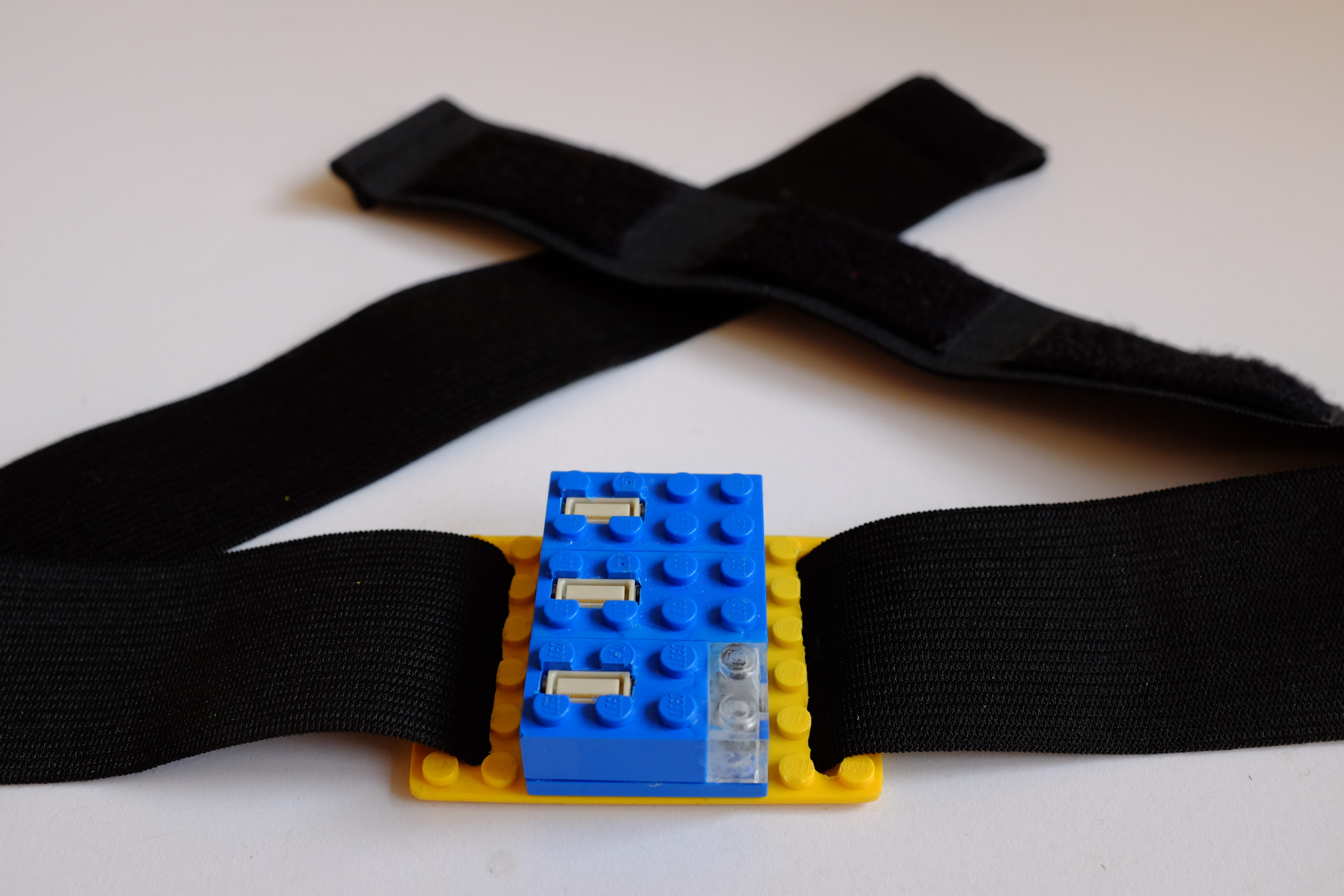
The initial prototype formed the first self-contained balance feedback belt for HD Haptics. It had two components: one BRIX2 controller on the chest to sense trunk orientation, communicating over a custom, low latency wireless interface with a second BRIX2 on the belt, which in turn relayed the tactor activation parameters over a serial link to four tactor units. Each tactor unit was assembled from one Arduino Mini, synthesizing a feedback signal through the Mozzi library. A small audio amplifier drove a Tactilelabs Haptuator mkI.
The first prototype demonstrated the feasibility of the approach, but was cumbersome to program, and the fabric mounts lead to dampening and coupling issues.
Second and Third/Current Prototype
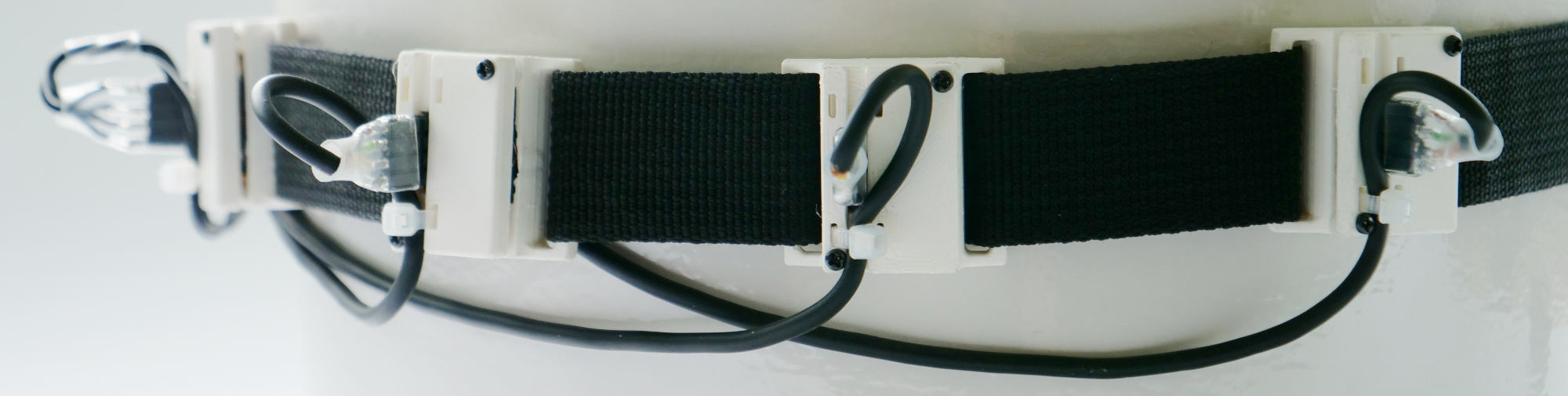
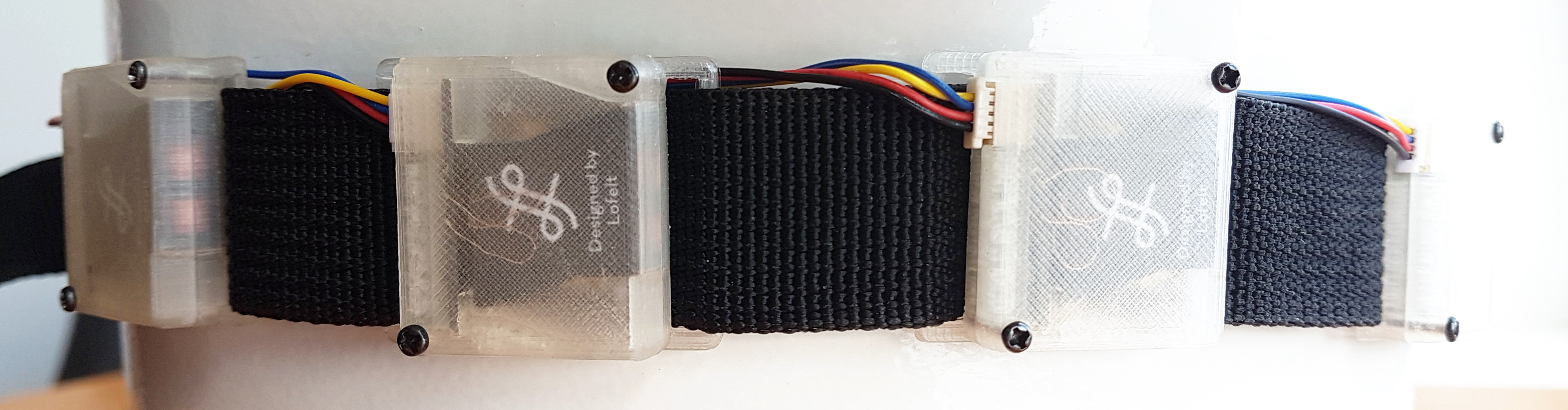
The second prototype replaced the individual microcontrollers for synthesis for a custom PCB with four channels of audio synthesis, based on the PJRC Teensy platform. As tactors I chose Lofelt L5 tactors, for their price and form factor, incorporating them in a 3D-printed parametric strap mount case. To facilitate initial experimentation in a stationary setting, I created an adapter to RJ45 cabling, allowing use of regular audio interfaces to generate the audio signals on a personal computer, and for example control stimuli parameters with MIDI controllers during exploration (shown below).


The third, and current prototype, is based on the (BRIX5 prototyping system, described separately)[/projects/2020-BRIX5], leading to much improved interconnects, extensibility, and reproducibility.
Experimentation


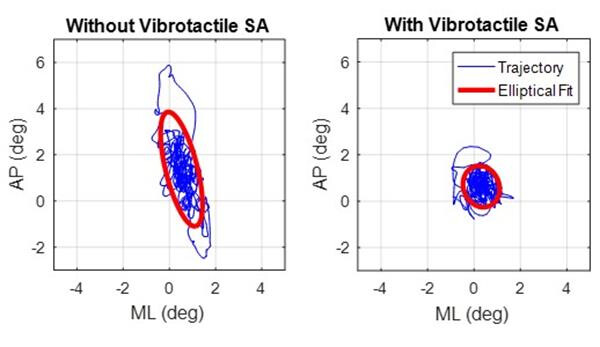
Above is a screenshot of the BeltController application, used for evaluating novel balance stimuli, a double actuator unit combining a Lofelt with an ERM tactor to allow comparative experiments, and example stabilogram showing the center of mass excursions with and without feedback.